TI5ROBOT KAUPAPA KAUPAPA


Ko te "Ti5robot vision" e ahu mai ana i runga i nga otinga whakangao taputapu karetao mohio, na te auahatanga mohio, ka arahina e te R&D, te hanga me te hanga taputapu karetao.Ka whakawhiwhia ki nga kaihoko nga taputapu karetao mohio me nga otinga hangarau whakahaere somato- sensory, me te whakaputa tonu me te hanga uara.
RATONGA KAUPAPA
Whakaotihia te raruraru kaore e taea e te miihini paerewa i runga i te maakete te whakatutuki i te hiahia mo nga kaihoko.
Whakaorangia te huringa whanaketanga hua mo nga kaihoko.Whakaorangia te kore o nga pukenga hangarau taputapu mo nga kaihoko.
KAUPAPA KAUPAPA ABlLlTY
He momo hou o te karetao mohio, kua whakatapua ki te tango i nga arai o te mahi tahi tangata-miihini.
Tukua kia whakakorehia e te karetao nga here o nga arai, nga whare herehere ranei.
| Tawhā taketake | Ti5 Robot Arm-3 |
| Taumaha | 9.2kg |
| Utauta | 3kg |
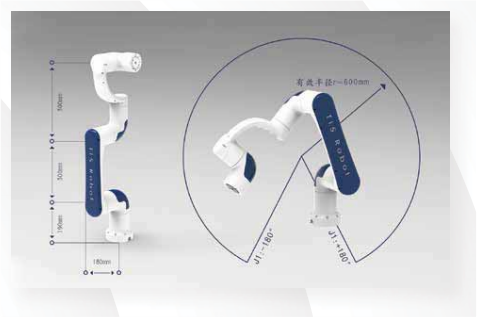
| Putoro mahi | 600mm |
| Te tika o te tuunga tukurua | 0.05mm |
| Te herekoretanga | 6 |
| Kohi hiko angamaheni | 160w |
| Atanga ki te mana | Mana ROS, mana PYBULLET, mana poroporoporo, mana PYTHON, mana C++ hoahoa modular, ngawari te wetewete me te huihuinga, te motuka servo + te whakaheke oro. |
| Nga miihini hiko | Te nekeneke taipana ngawari+whakaiti orite |
| Mains | 24-48V |
| Awhe hono | J1(+/-180。)J2(-265.~85。)J3(+/-150。) J4(+/-180。)J5(+/-175。)J6(+/-175.) |
| Rauemi | Konumohe konumohe, kapia |
| Taiao Mahi | 0.C - 50.C |
| Te tuku hiko | DC 48V,5A;DC 24V,5A |
| Tawhā motopaika | Ko te hononga whakakotahi o te karetao haurongo hollow |
| Nihokikorangi | 4.2 |
| USB | 4 |
| HDMI | 1 |
| IO atanga | 4 |
| Whakawhiti ohorere | 1 |





